Der Sauger hat bislang noch garnichts gemacht.
Hatte zum Test hinter den wemo den debug output gehangen.
Wenn der Sauger sich in den Objekten über den Controllbutton nicht starten lässt, ist vermutlich doch der Token falsch. Der Adapter ist trotzdem grün.
Dann häng den Debug einmal hinter dem switch, beide Ausgänge. Je nach schaltzustand sollte dann dort auch was raus kommen.
Du kannst aber auch, Wenn hinter dem switch ein Output kommt, In iobroker unter Objekte den Sauger manuell starten. Oder unter dem Datenpunkt 'find’ganz rechts auf den Button in der Spalte Wert klicken, dann sagt der Sauger “Hallo, Ich bin hier!”. (in der Sprache die eingestellt ist)
Wenn der Sauger unter Objekte nichts macht ist da das Problem…
1 „Gefällt mir“
Alles klar super, vielen Dank für die Hilfe!
Werde mich nach Feierabend mal dransetzen wenn die Queen es erlaubt 
Anschließend melde ich mich und berichte…
3 „Gefällt mir“
So, habe Objekt/Instanz/Adapter gelöscht und neu installiert. Leider nach wie vor der gleiche Zustand. Der Sauger lässt sich von nichts beeindrucken 
Irgend eine Idee woran das liegen könnte?
Ich tippe auf einen falschen Token. Hast du zufällig die Netzwerkverbindung mal zurückgesetzt? Dann ändert sich auch der Token.
Kannst du den Robbi über iobroker ansprechen?
1 „Gefällt mir“
Würde diese Statusanzeige auch bei einem falschen Token alles grün anzeigen?
Ich lese den Token trotzdem nochmal eben neu aus

Nein, der Robbi lässt sich nicht über “Objekte” manuell ansprechen.
Okay das war es tatsächlich! Jetzt kann ich ihn erreichen 
Vielen dank für die Hilfe!!!
2 „Gefällt mir“
Top  Viel Spaß
Viel Spaß
1 „Gefällt mir“
Hallo zusammen,
ich habe alles nach deinem Plan eingerichtet und der Roborock lässt sich auch über Objekte und Alexa starten/bedienen. Leider funzt es mit Homee / Wemo irgendwie nicht. Habe deine Daten kopiert und bei Nodered eingefügt.
Der Status ändert sich auch von On auf Off wenn ich den Schalter in Homee bediene, aber der Robo startet einfach nicht. Hast du da eine Idee?
Hast du denn den Robbi auch in node-red an den Wemo angekoppelt?
Wie sieht dein Flow aus und wie dein “Fahrbefehl”?
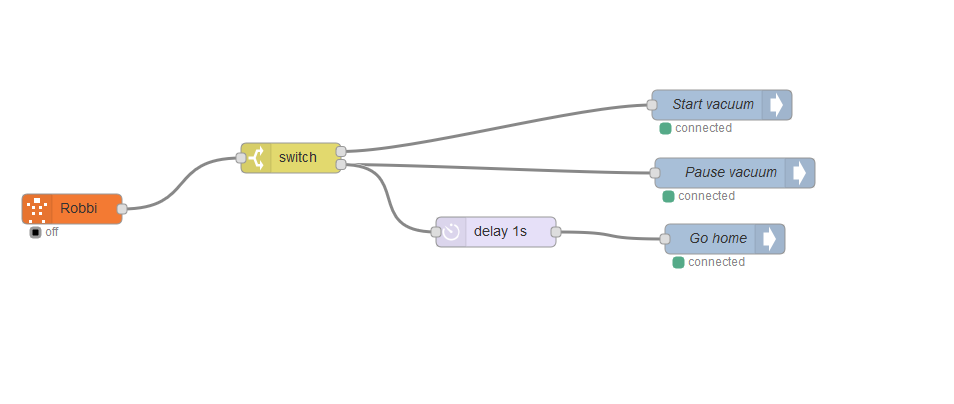
ich habe einfach den Flow aus dem ersten Post so kopiert:
[
{
„id“: „ebc3425b.5c28a8“,
„type“: „wemo-emulator“,
„z“: „74688e9c.1ad388“,
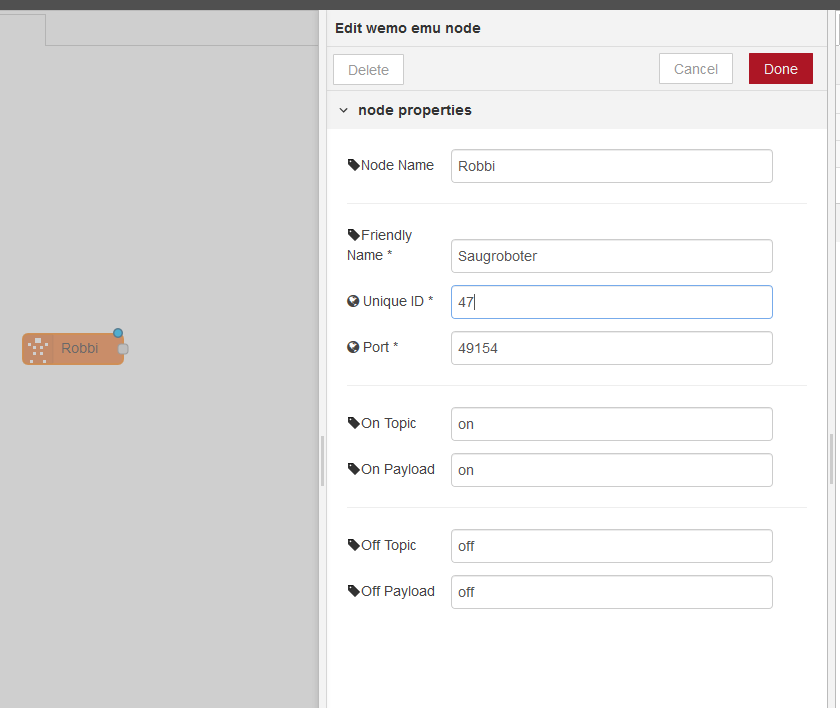
„name“: „Robbi“,
„friendlyName“: „Robbi“,
„serial“: „45“,
„port“: „49154“,
„onTopic“: „switch/Robbi“,
„onPayload“: „on“,
„offTopic“: „switch/Robbi“,
„offPayload“: „off“,
„x“: 110,
„y“: 283,
„wires“: [
[
„94d96bf1.9d92“
]
]
},
{
„id“: „94d96bf1.9d92“,
„type“: „switch“,
„z“: „74688e9c.1ad388“,
„name“: „“,
„property“: „payload“,
„propertyType“: „msg“,
„rules“: [
{
„t“: „eq“,
„v“: „on“,
„vt“: „str“
},
{
„t“: „eq“,
„v“: „off“,
„vt“: „str“
}
],
„checkall“: „true“,
„repair“: false,
„outputs“: 2,
„x“: 329,
„y“: 232,
„wires“: [
[
„bbe789d0.9b2008“
],
[
„52e9a75b.f03e3“,
„acaf2f70.4b791“
]
]
},
{
„id“: „bbe789d0.9b2008“,
„type“: „ioBroker out“,
„z“: „74688e9c.1ad388“,
„name“: „Start vacuum“,
„topic“: „mihome-vacuum.0.control.start“,
„ack“: „false“,
„autoCreate“: „true“,
„x“: 760,
„y“: 179,
„wires“:
},
{
„id“: „52e9a75b.f03e3“,
„type“: „ioBroker out“,
„z“: „74688e9c.1ad388“,
„name“: „Pause vacuum“,
„topic“: „mihome-vacuum.0.control.pause“,
„ack“: „false“,
„autoCreate“: „true“,
„x“: 773,
„y“: 247,
„wires“:
},
{
„id“: „acaf2f70.4b791“,
„type“: „delay“,
„z“: „74688e9c.1ad388“,
„name“: „“,
„pauseType“: „delay“,
„timeout“: „1“,
„timeoutUnits“: „seconds“,
„rate“: „1“,
„nbRateUnits“: „1“,
„rateUnits“: „second“,
„randomFirst“: „1“,
„randomLast“: „5“,
„randomUnits“: „seconds“,
„drop“: false,
„x“: 534,
„y“: 306,
„wires“: [
[
„ceb8cd9e.fb29c8“
]
]
},
{
„id“: „ceb8cd9e.fb29c8“,
„type“: „ioBroker out“,
„z“: „74688e9c.1ad388“,
„name“: „Go home“,
„topic“: „mihome-vacuum.0.control.home“,
„ack“: „false“,
„autoCreate“: „true“,
„x“: 763,
„y“: 313,
„wires“:
}
]
Das beantwortet aber nicht diese Frage. ![]()
Nur „kopieren“ reicht nicht. Du musst auch noch den Inhalt der Nodes an deine Einstellungen anpassen.
öhhh , was meinst du denn mit ankoppeln? Bzw. wie / wo mache ich das? 
Ich habe noch nicht ganz verstanden, wie und wo den Robbi schon ansteuern kannst?!
Du musst ihn ja auch in node-red hinzufügen, damit die “Schnittstelle” überhaupt da ist.
Das steht ja praktisch alles genau hier zu Beginn im Thread von @memooo erläutert.
Hast du das denn schon alles so gemacht und läuft das auch schon alles so?
ok ich fasse mal zusammen:
-
Iobroker - Roborock Verknüpfung funktioniert. D.h. unter Objekte kann ich mit den Tastern in Iobroker den Roborock steuern
-
über ALexa lässt er sich ebenfalls starten
-
ich habe node-red wie oben beschrieben installiert und der Wemo Taster wird vom Homee auch gefunden und in Node Red zeigt er diesen auch an. Betätige ich den Schalter in der Homee App, ändert sich auch der Status im Node-Red von Off auf On bzw. anders rum.
-
den Flow habe ich wie oben schon geschrieben einfach kopiert. Leider startet der Roborock dann nicht. Es tut sich gar nichts.
Ich habe jetzt aber nur den kompletten Flow kopiert wie hier zu sehen:
Flow
oder muss dies hier noch separat erstellt werden?
BILD
{kind=link}
{kind=link}
Also in 2 unterschiedlichen Flows?
Ich glaube der Fehler liegt im Wemo; bin aber nciht sicher.
Bei Topic on muß glaube ich stehen switch/on und entsprechend auch für off.
Ansonsten funktionieren bei mir auch kopierte Fows nie; ich muß sie praktisch nachbauen.
Also evtl. mal die Nodes hinter dem Wemo neu erstellen.
habe den Fehler gefunden. Im mihome Adapter darf der Punkt “Sende eigene Befehle” NICHT aktiviert sein. Nun funzt alles. Danke nochmals 
2 „Gefällt mir“
Mein Roborock S50 hat heut ein Firmware Update angeboten.
Er scheint jetzt Zonen speichern zu können, was vorher nicht möglich war.
Leider konnte ich keine Details im Internet finden, ausser das wohl auch ein Alexa Skill existieren soll der vielleicht mit dieser Verison funktionieren soll.
Firmware 3.3.9_001702
vielen Dank klappt wunderbar!
1 „Gefällt mir“